The terminal point is a point obtained by marking off a distance along the unit circle which has the circumference of , starting at the point . Table below gives the terminal points for some special values of .
The reference number associated with is the shortest distance along the unit circle between the terminal point determined by and the axis. As such, we find by moving along the circle to the negativeaxis if the terminal point lies in Quadrant or . This can be used to find a terminal point in any quadrant: find the terminal point determined by , and the terminal point determined by would be , where the signs are chosen according to the quadrant in which lies. For example, to find the terminal point determined by , by the fact that the reference number is and is in Quadrant , is .
Trigonometric Functions
The trigonometric functions sine, cosine, tangent, cosecant, secant and cotangent are defined by using the coordinates of the terminal point on the unit circle determined by any real number :
The functions sine and cosine are defined for all values of ; cotangent and cosecant have in the denominator, so their domains do not include the points for which coordinate determined by is , that is, for any integer ; similarly, tangent and secant are not defined when for any integer .
Similarly, we also use the reference number associated with to evaluate trigonometric functions. The value of each trigonometric function at is the same as its value at except possibly for sign, which depends on the quadrant in which the terminal point of lies. For example, to find the value for , since the reference number for is and the terminal point of is in Quadrant ,
If we know the value of any one of the trigonometric functions at , we can find the values of all the others at using the fundamental identities (reciprocal identities and Pythagorean identities). For example, to write in terms of where is in Quadrant :
Trigonometric Graphs
Recall that the circumference of the unit circle is , it follows that the terminal point determined by is the same as that determined by . As a consequence, the functions sine and cosine have period.
The functions
complete one period as varies from to , that is, for , thus have period . The number is called the amplitude and is the largest value these function attain. We see the effect of is to shrink the graph horizontally if or to stretch the graph horizontally if . The graphs of these functions are called sine curves and cosine curves (collectively referred to as sinusoidal curves). The sine and cosine curves and are simply shifted horizontally by an amount , an appropriate interval on these to graph one complete period is . If or , the function determines how the amplitude of varies, and the graph of lies between the graphs of and .
Tangent and cotangent have period since . Notice and are not defined, therefore and are vertical asymptotes of the graph of . By a similar analysis, cotangent has vertical asymptotes and . The transformations
have period . An appropriate interval to graph one period of is and an appropriate interval to graph one period of is .
Cosecant and secant have period since they are the reciprocals of sine and cosine, and can be graphed by taking the reciprocals of the coordinates of the points of the graph of and . These functions have vertical asymptotes at those values of for which the denominator or . The transformations
have period . An appropriate interval on these to graph one complete period is .
Trigonometric functions are not one-to-one and may only have inverses on restricted domains. The inverse sine function arcsine is the function , also denoted by , with domain and range defined by
In other words, is the number whose sine is, in the interval .
Similarly, the inverse cosine function arccosine, denoted by , is the function with domain and range . The inverse tangent function arctangent, denoted by , is the function with domain and range .
Modeling Harmonic Motion
The equation
depending on the starting point, describes the displacement of an object at time in simple harmonic motion. A cycle is one complete vibration of an object. is the period of time required to complete one cycle and its reciprocal is naturally the frequency–number of cycles per unit of time. We often write equations of simple harmonic motion in the form of
where (greek letter “nu”) is the frequency since . The graphs of these functions may be shifted:
In such cases the vertical shift indicates the variation occurs around an average value and the horizontal shift indicates the position of the object at .
Damped harmonic motion is the type of motion in which the amplitude decreases with time:
We can see that damped harmonic motion is simply harmonic motion for which the amplitude is governed by where constant is the damping constant and is the initial amplitude.
Any sine curve can be expressed in the form of
where is called the phase (or phase angle): the motion “starts” at an angle , or, to factor out from the equation:
shows a graph shifted horizontally on the axis. This is the time required for the motion to be “reset to starting position”. The time is called the lag time if or the lead time if . For the curves and , the phase difference between and is . The waves are in phase if the phase difference is a multiple of and are otherwise out of phase.
Angle Measure
An angle consists of two rays with a common vertex, usually denoted by Greek letters such as , and . The measure of an angle is the amount of rotation about the vertex required to move its initial side onto its terminal side. One unit of measurement is the degree, an angle of measure degree is formed by rotating the initial side of a complete revolution. A more natural method is the radian measure (abbreviated rad): the length of the arc of a circle of radius , with its center at the vertex of the angle. A complete revolution has measure rad. Intuitively, in a circle of radius , the length of an arc that subtends a central angle of radians is
And to solve for ,
This is an important formula that allows defining radian measure using a circle of any radius. The radian measure is, essentially, the number of “radiuses” that can fit in the arc that subtends , hence the name.
A sector of a circle of radius with central angle has an area of
For circular motion, angular speed is the rate at which the central angel is changing:
Triangles Approach
Any right triangles with as one of its acute angles are similar and share the same trigonometric ratios as defined:
These are useful in solving triangles which is to determine all six parts of a triangle: the three angles and three sides. For example, If a right triangle has hypotenuse , we have
Let be an angle in standard position, and be a point on the terminal side, is the distance from the origin to the point, we define the trigonometric functions of angles as follows:
Trigonometric functions of an angle that isn’t acute have the same values, except possibly for sign, as the corresponding trigonometric functions of an acute angle which is called the reference angle. The reference angle is formed by the terminal side and the axis. For example,
Solving Triangles
A triangle is determined by three of its six parts as long as at least one of these three part is a side. The possibilities are as follows:
One side and two angles ( or )
Two sides and the angle opposite one of those sides ()
Two sides and the included angle ()
Three sides ()
If we know the lengths of two sides and and the included angle of any triangle, let be the base and the height of the triangle would be . Thus the area of the triangle is
If we follow a convention of labeling the angles as the uppercase of the label of the corresponding opposite sides, we have
This gives the Law of Sines: in triangle ,
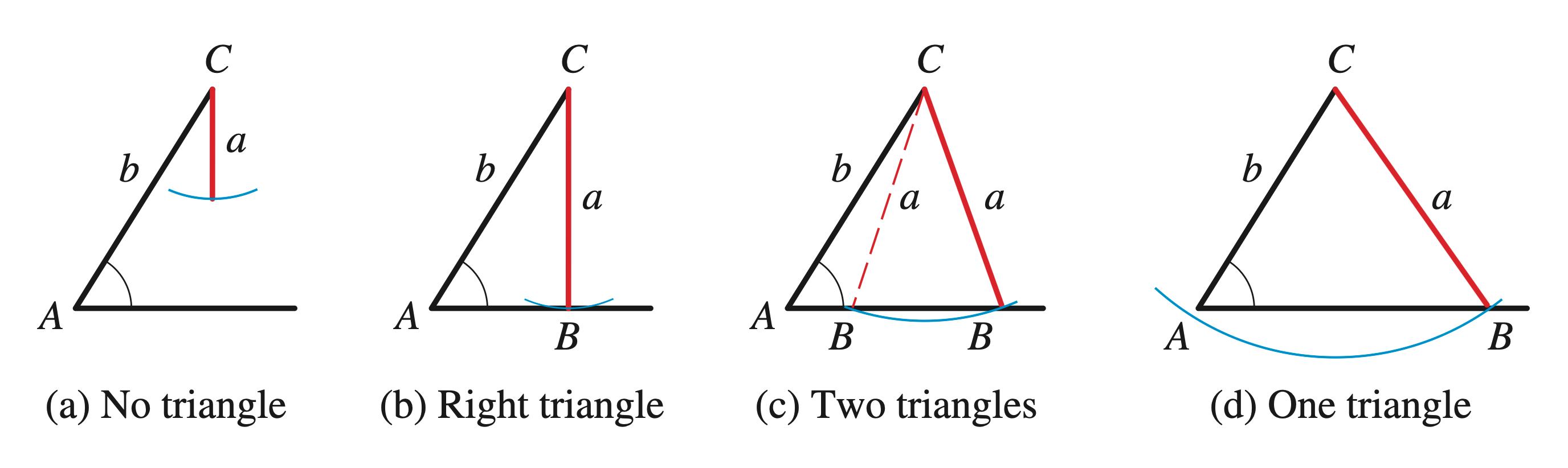
This can be used for solving the first two cases mentioned earlier: or , and . or always determine a unique triangle while is called the ambiguous case because the given angle and two sides may form two, one or no triangles: one side may be too short to form a triangle or just enough to have two possibilities.
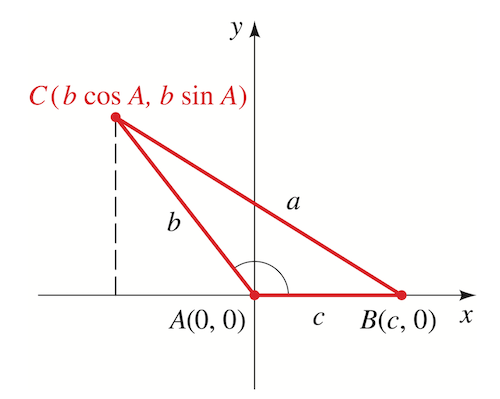
If we place any triangle so that is at the origin, the coordinates of the vertices would be and , as illustrated.
Using the Distance Formula,
This gives the Law of Cosines: in triangle ,
The Law of Cosines says the square of any side of a triangle is equal to the sum of the squares of the other two sides minus twice the product of those two sides times the cosine of the included angle. Notice if the angle is a right angle, its cosine would be , and the Law of Cosines reduces to the Pythagorean Theorem. This can be used for solving the last two cases in which we can solve a triangle: and .
In case both the Law of Sines and the Law of Cosines can be used, the Law of Cosines is generally preferred as it does not introduce ambiguity, since an angle and its supplement both have the same sine.
Heron’s Formula is used for finding the area of a triangle from the lengths of its three sides:
where is the semiperimeter (half the perimeter) of the triangle.
Analytic Trigonometry
An identity is an equation that is true for all values of the variables defined. Many identities follow from the fundamental trigonometric identities. We can prove that a given trigonometric equation is an identity by rewriting them and sometimes working with both sides separately. For example, to verify the identity :
Sometimes it’s useful to convert algebraic expressions to trigonometric ones. This technique is called trigonometric substitution. For example, to work with the expression , we can substitute for . Assume that , setting ,
Conversely, when working with expression involving inverse trigonometric functions, such as , we write them in terms of . First let , which means , we then sketch a right triangle with an acute angle and a hypotenuse of . The adjacent side would be and the opposite side would be . Thus
In a right triangle, the sum of the two acute angles is or . This relationship is described by the word complementary: the two acute angles are complementary. The cofunction identities state that a trigonometric function of an angle is equal to the corresponding cofunction of the complementary angle . Intuitively, the side that is “opposite” to is the same side that is “adjacent” to . These cofunction identities are parts of the fundamental trigonometric identities:
Consider a unit circle with terminal points starting at and terminating at determined by distance , determined by distance and determined by distance . Notice the distances between and and between and measured along the arc of the circle are equally , and since equal arcs are subtended by equal chords, it follows that :
This is the Addition Formula for Cosine. Replacing with , we obtain the Subtraction Formula for Cosine:
which can then be used to prove the Addition Formula for Sine:
Then naturally,
If we add the Addition and Subtraction Formulas for Sine:
If we let and , that is,
we get
This is a Sum-to-Product Formula. We can obtain the remaining three of the following Sum-to-Product Formulas in a similar manner:
Following the same expression we also have Product-to-Sum formulas which allows us to write the product as a sum of trigonometric functions:
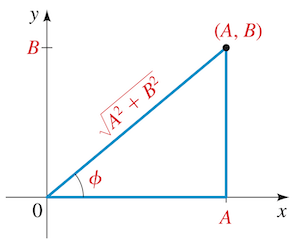
Consider a point in the plane forming a right triangle in standard position with an angle , is the length of the hypotenuse, as illustrated.
We have
Conveniently if we use in the Addition Formula of Sine, we have
or simply
where . To summarize, sums of sines and cosines can be written in terms of a single sine function.
The Double-Angle formulas are immediate consequences of the addition formulas:
From the Double-Angle Formula for Cosine we obtain the Formulas for Lowering Powers. These allow us to write any trigonometric expression involving even powers of sine and cosine in terms of the first power of cosine only:
Substitute in these formulas and take square root and we get the Half-Angle Formulas:
The choice of the sign depends on the quadrant in which lies. In the case of the Half-Angle Formula for Tangent we get
However, and have a very special relation, that is, they always have the same sign. Thus